
動画サイトで見かけた農薬散布用ラジコンプロペラボート(エアボート)を自作しました。ほぼ完成です。 いろいろなRCプロペラボートがありますけれど、参考にしたのは次です。
動画1
小規模圃場用としての電動ボートです。重心がやや高いのと推進力を出すモーターが船体から離れているためか、あるいはタンク内で液剤の移動があるのか、発進の時に前のめりに船首が水を被っています。(0:49秒) ガソリンエンジンであれ電動であれ、ほとんどのボートは、操舵は後部に設けた翼で制御しています。 それに対してこちらのレスキューボートは、モーターマウントを左右に振って舵にしています。
動画2
最初に見かけたのは、、HM レスキュー・フロートプロペラボート レッド(フルバージョン モーター+アンプ+サーボ付属) – HC2520(A) RESCUE Float Full Version でした。 写真1
写真1
これらを参考に、(適当に)製作を開始して、出来上がったのがこれです。
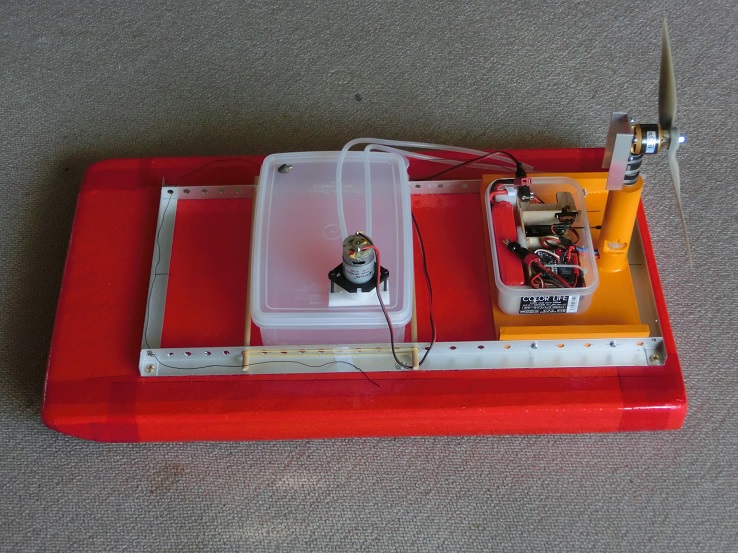 写真2
写真2
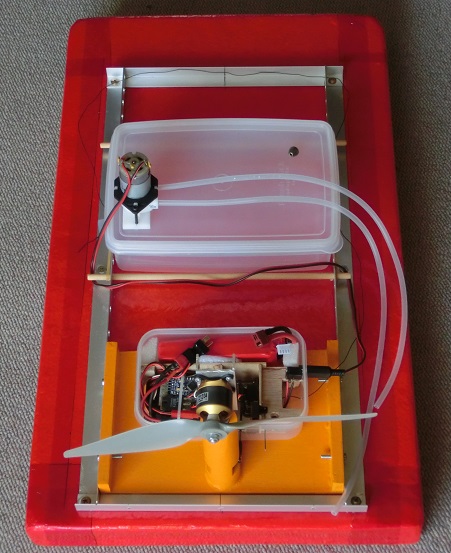 写真3
写真3
ほぼ完成で、あとアンテナとポンプの給排水部分だけです。目標は次です。
- 手持ちの材料で、なるだけお金をかけない。
- 10アールから20アールの小規模圃場用・・・エンジンは手持ちに無いので電動にする。
- 薬液タンクは100円ショップのタッパウエア・・・重心を低くするため、なるべく浅い1.5リットル。
- 横安定を持たせるために、船体は短め。代わりに直進性は悪くなる。
- 支柱で支えたモーターマウントをサーボで動かして舵とする。工作が楽。代わりにマストの精度が悪いと舵が甘くなる。事実ニュートラルが若干甘くなった。
- モーターからの3線を支柱に通したアルミパイプに通す。またサーボのボールリンクをアルミパイプに取り付ける。ここがこの製作のカギ。
- お分かりのように、電源、受信機、サーボ、モーター、操舵の一式がワンボードに納まる。ユニット化できるので、ユニットを前後反対にセットすれば、普通に推進するか、プッシャーにするか選べる。(重心位置をかなり変えられる。)
- 薬液タンクの取り付け位置も変えられる。
3.の薬液タンクについて、もし大きいタンクを用いるならば、底の浅いものがよいです。かつ、薬液の移動によって船体の重心が移動することによって舵が取られます。動画1の前のめりは、これが原因かも知れません。薬液タンクを板で幾つかに仕切る対策が必要になります。これはタンクローリーと同じです。軽トラックで水を運んだ際に、(事前に聴いていたけれども)反動が凄いので驚いた経験があります。タンクに半分入った状態が最も危険です。発進と停止時の反動が凄いです。
多くの方がやっているように船体を子ども用のボディーボードにしようか考えました。けれども手持ちの発泡スチロールに20年棚ざらしになったオラカバフィルム(赤色)が低温で貼れることがわかりました。出来上がったのがこれです。110度くらいのアイロンを当てても直ぐには溶けませんでした。
 写真4
写真4
 写真5 60cm35cmで厚さ5cm
写真5 60cm35cmで厚さ5cm
アルミアングルとタッパ(薬液用と制御ボックス)を置いたところです。
 写真6
写真6
中央に写っているのは通販で買った水中ポンプです。右端はバッテリーです。リポ3セル11.1V2200mAhです。これが一番高くなるはずでした。今回、ポンプの件で思わぬ出費となりました。後述します。
ポンプの吐出量を調整する必要があります。今回、手持ちの mini arduino pro を使います。予めarduino uno でコントローラ部を作ります。主に参考にしたのは次のサイトです。
- おいでなんしょ さんの「マグネットアクチュエータコイル巻き線コントローラ」
- Arduinoでコマを回そう! PWMでDCモーターを制御する
- ラジコンをArduinoで自動運転!その12(PWMスルー)
- デジモノ覚え書き さんの「Arduino Uno – PWM周波数を”自由に”変更する」
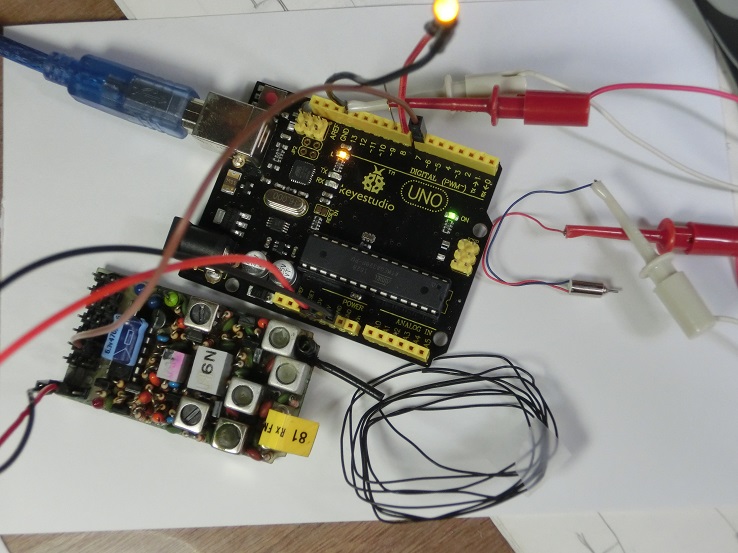 写真7
写真7
上はunoです。下のJRの6ch受信機の電源はunoから供給します。6chにPPM信号が入ったらLEDを点灯し、同時に右端にあるマイクロモーターを回します。以前、小型サーボをunoから直接動かしたことがあるのでこれくらいのモーターなら大丈夫のはずです。テスト中のPCは次です。
 写真8
写真8
泥縄式でお見せできる代物ではありませんので割愛します。参考サイトのスケッチ片を寄せ集めただけです。
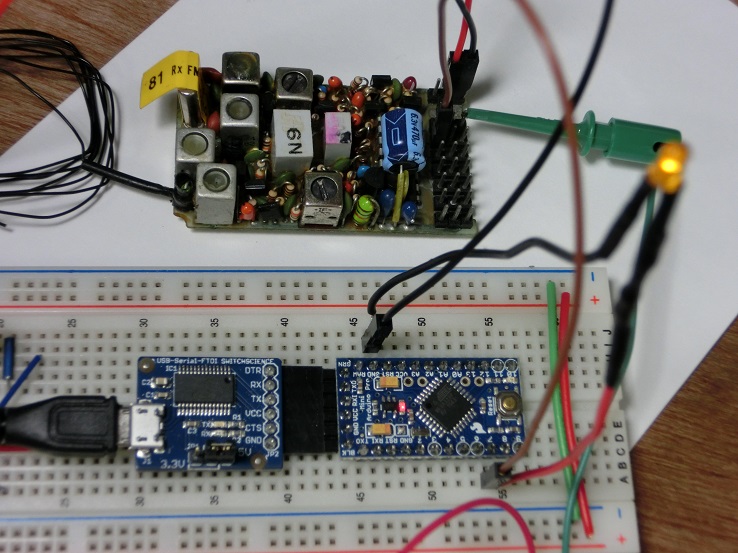 写真9
写真9
出来上がったものを mini pro に移します。この辺が arduino の便利なところです。問題が無いようなので、FET回路とつなぎます。
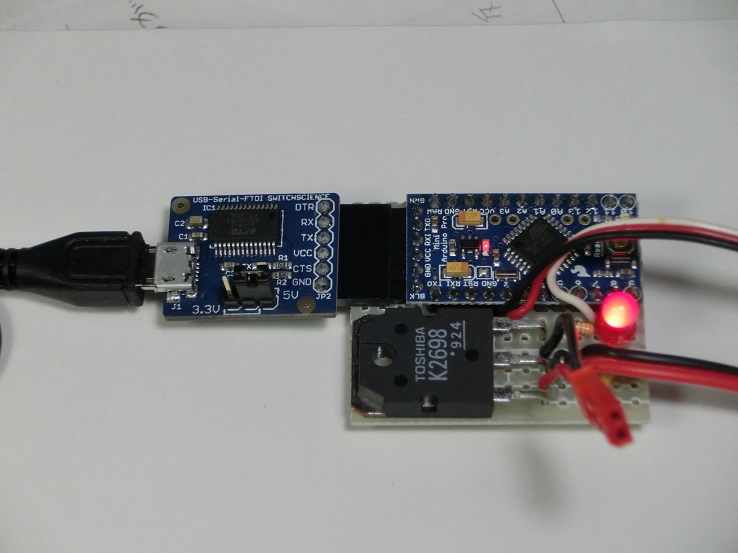 写真10 ポートからFETを直接ドライブ
写真10 ポートからFETを直接ドライブ
ポンプの電流は大きくない想定ですので、ヒートシンクはナシです。 で、出来上がった制御系全体が次です。
 写真11
写真11
プロポはフライトシミュレータ用に改造したものです。忘れてました。右肩の6chスイッチで薬液ポンプのモーターのオンとオフ、ボリュームでポンプのPWMのデューティー比を変化させるようにしました。
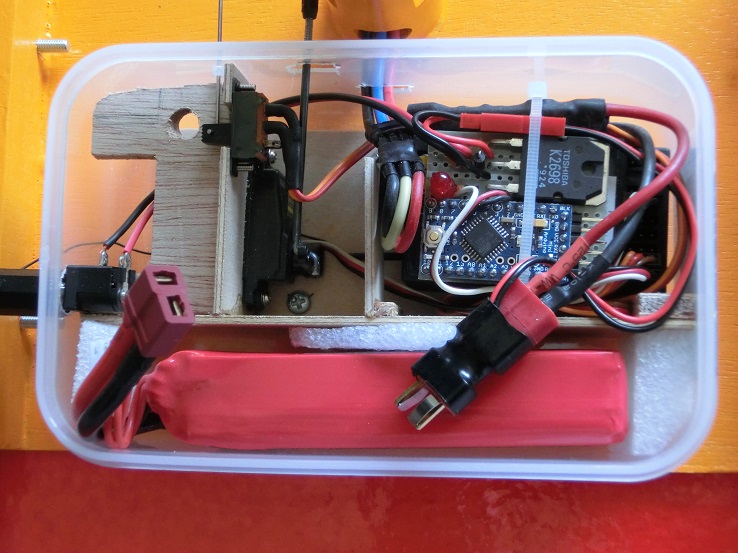
写真12 電池 受信機 ポンプ制御 サーボ を収めたユニット
ここで問題発覚。薬液ポンプは購入直後、銘板に「DCブラシレス」の文字を発見。注文時には、そんなこと書かれていませんでした。嫌な予感は的中。 ブラシレスモーターは電圧による回転数制御ができませんでした。がっかり。 そこで、PWMの周波数を上げてみた訳です。
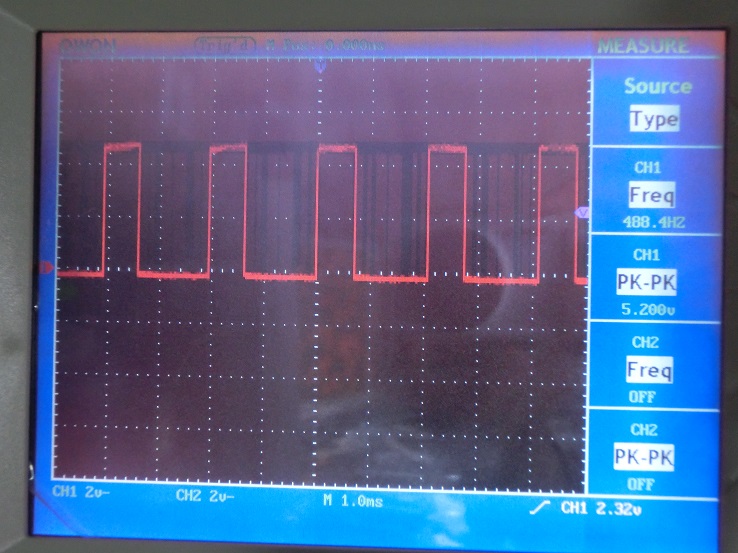 写真13
写真13
参考にしたプログラムでは確かに488.4hzが出ています。この周波数を上げて確かめました。
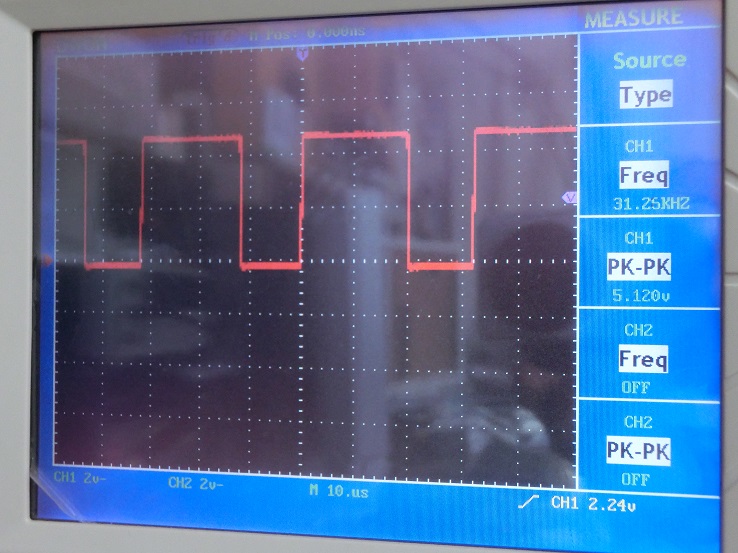 写真14
写真14
変更後、31.25khzになっています。これでポンプの回転数を確かめました。結果は予想の通りダメでした。ある電圧(デューティー比)まで回りませんが、ある電圧から急にほぼ100%で回り出します。これでは使えません。このDCブラシレス水中ポンプは諦めました。
そこで、ギヤポンプを購入。
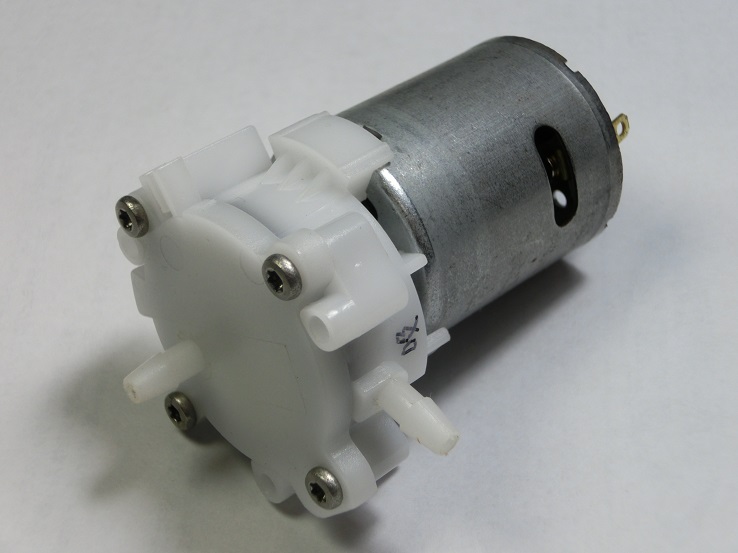 写真15
写真15
これだとDCブラシモーターなのでPWM制御が可能です。ところが試したところ自吸しません。ギヤポンプならば薬液タンクの外に取り付けても自吸するはずです。呼び水をすると吐出します。でも自吸しません。おまけに防水ではありませんからタンク内に水没できません。これは買ったときからゴミです。ガッカリです。ポンプ2個で3000円近くしました。バッテリーより高くついています。
そこで思い出したのが燃料ポンプです。30年ほども前に買ったやつです。
 写真16
写真16
因みにギヤポンプは、潤滑性のない水には使えません。使用時間が(想定)10分程度ですのでOKと考えます。 でも、ちょっと残念です。そこで思い直して三度目の正直で次を買いました。
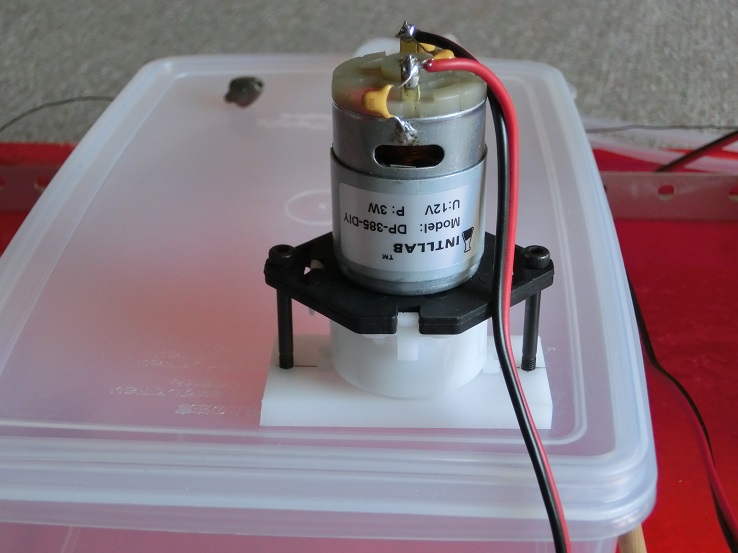 写真17
写真17
チューブポンプです。自吸式でかつDCブラシモーターで流量はとれませんけれど定量です。揚程はほぼ無しの机の上で測ってみたところ、DC12V15mAほど流れて500ミリリットルの水を10分で揚げました。少し遅いです。計画では10アールあたり1リットル(500ミリリットルの薬液を倍に希釈したもの)を10分ほどで散布するつもりでした。
仕様をよく見ると「内径3ミリ外形5ミリで50ml毎分」とあります。実測値にピッタリです。 さらに読むと「内径4ミリ外形6ミリで100ml毎分」とあります。すぐにシリコンチューブを購入し交換した上で試しました。 結果、500ミリリットルで5分半くらいでした。これなら原液を5分で散布してもよいし、プロポのボリュームで少し下げて10分未満で散布できます。これでOKです。
プロペラは手持ちの電動用10×8インチでした。ところでブラシレスモーターは3線の内、2線を入れ替えれば逆転できるはずです。普通に推進にするかプッシャーにするかいろいろ試す内に振動が凄くて、試しにアンプ(ESC:HACKER MASTER 30-3P)のタイミングを替えたところ一瞬でプロペラが吹き飛びました。無用なことはするものではありません。
 写真18
写真18
動力のブラシレスモーターは電動飛行機に使っていたのAXIの2212/23です。アウトランナー型です。今はノーブランドで無茶安で売っています。
 写真19
写真19
モーターの特性を考えるとプロペラ10×8インチは負荷がきついです。スロットル最大で15分くらい回ります。 また手持ちの10×5インチだとやや軽く回ります。試すと中スローで30分近く回ります。こちらの方が案配はよいです。もしかしたら10×7インチを使うかも知れません。
今回の製作のキモです。
木製パイプに丁度合うアルミパイプがあったのでモーターマウントを乗せる支柱を作ろうと考えました。このアルミパイプの厚みは1ミリです。ボールリンクをネジ止めするには薄すぎます。振動事故でねじ穴がバカになりました。作り直しです。その後も不安で完成後にアルミパイプのねじ穴にボールリンクを接着しました。よい方法を思いつきません。肉厚のあるパイプがあればベストです。
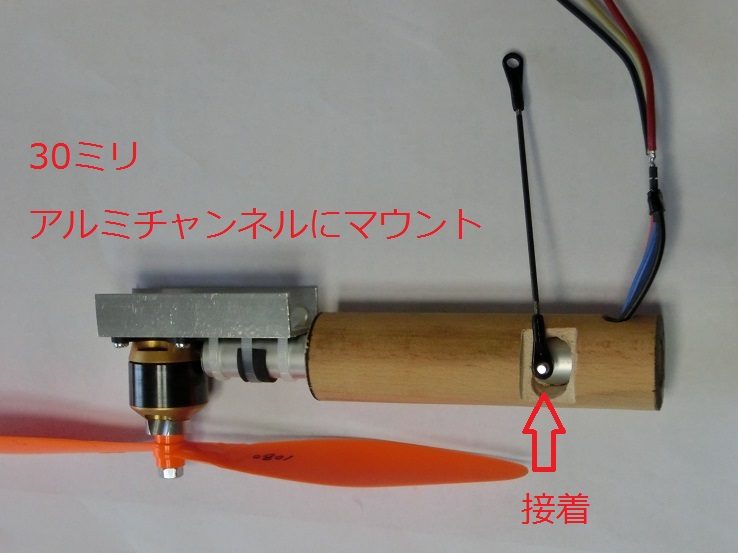
写真20
船体まとめ
発泡スチロール(60cm35cmで厚さ5cm)にフィルム貼り 重量は1260g 薬剤(液体)1500gまで搭載可 フルスロットルで約15分くらい稼働です。モーターAXIの2212/23 アンプ(ESC:HACKER MASTER 30-3P)BEC付き リポ3セル11.1V2200mAh搭載
ちっちゃな田舎の田んぼの除草剤(粒剤)をこれまで手で撒いていました。次期春には使えるでしょう。その前に何処かで試運転が必要です。ボートは初めてなのでノーコン即漂流が怖いです。自作をお考えの方は参考まで。
因みに草刈り機用のガソリンエンジンの常用回転数は模型飛行機用のプロペラ回転数と大きく差があります。推力を出すにはエンジンの回転数を上げる必要がありますけれども、ムリです。だから多くの自作機に逆ピッチペラを2枚重ねて使われている例があります。この点を工夫する必要がありそうです。反トルクが操縦に影響してそうです。考えるといろいろ気付きます。
エンジン+電動で優れていると思うのは次です。
動画3
チェーン除草というのがあるのを知りました。電動ではムリですね。
追記11月24日 一応、完成したので写真を追加します。
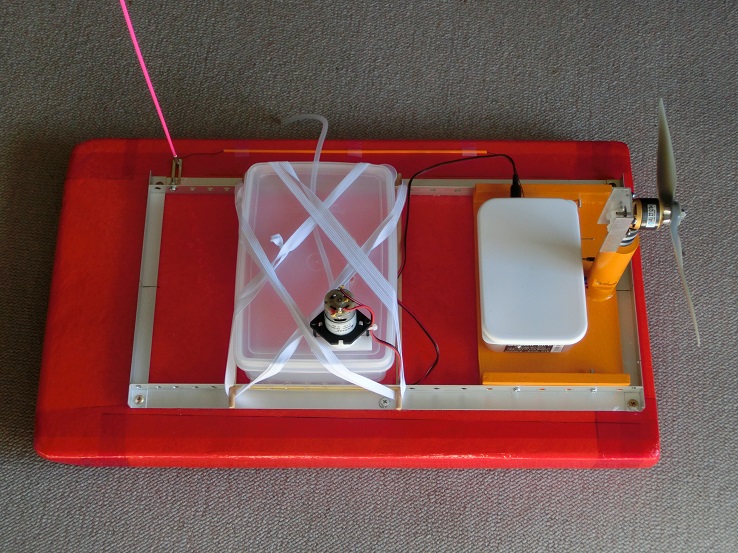 写真21
写真21
アンテナは船首に取り付けました。タンクはゴムひもで固定。ニュートラルが甘いのはサーボのガタです。できるだけ詰めましたけど仕方ありません。 この状態で重心は後ろから3分の1くらいの位置にあります。薬液を入れたらもう少し前になりそうですが、これでよいのかわかりません。実際に走らせてみてタンクとユニットの位置を決めればよいと考えます。
フルスロットルで舵を鋭くきりますと、モーターマウントは首振ります。そのときペラがブンブンと音がします。少しジャイロ効果があるようです。
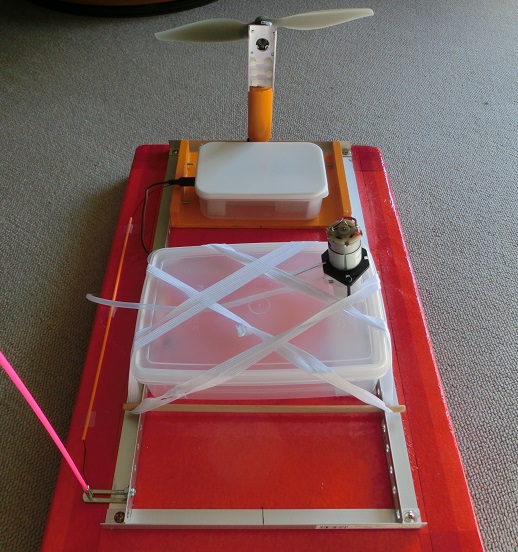 写真22
写真22
薬液タンクは片方に傾斜させてます。RC用燃料タンクに使う重りをタンクの角に届くように入れてます。これでエア噛みしながらも薬液をほぼ吐き出せます。
追記12月5日
先だって、ため池に出向いて試走してきました。以下を確認しました。
- 前後の重心。
- 薬液タンクと推進ユニットの位置の確認
ダミーで水を500ml入れての試走でした。加速減速に不都合はありません。水を吐出するに5分は短く感じました。プロポの側で調節するより、薬液を例えば1.5倍に希釈して散布に要する時間を調節した方が確実だとわかりました。水が無くなるにつれて船首が持ち上がってきました。再度試すべきは次です。
- 推進ユニットを前に。直進性はどうなるか確認。
- タンクを重心に近い方へ。
- 上の2点を変更したら、加速時に船首が前のめりにならないか確認。1000ml入れても大丈夫なように、最適を求める。
- その他。舵をいっぱいに切った状態において、全速前進した場合、横倒しに転覆しないか確認。
- 高速時に目一杯の舵を切って、転覆しないか確認。
4と5は通常使わないのでため池で試すのはムリです。来春の田植え前の圃場で確認した方がよいです。
ところで、田んぼの端に立って散布ボートを操縦するに向こう端の畦でターンする訳ですが、地上に立って100mほど向こうでは遠近感がほぼありません。昔のこと、ラジコンヘリによる農薬散布の作業を視察した際には、向こう側に人が立ってヘリが付近まで来たら手旗で合図してました。冒頭の動画1においても人が標識を揚げて合図してます。 一人で散布作業を行う予定ですので、人は頼れません。そこで赤外線を使った標識を製作中です。使い方は以下です。
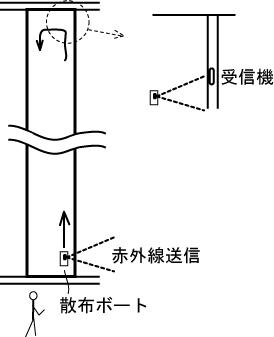 図1
図1
田んぼのこちら側から発進します。ボートには赤外線を出す装置を積んでます。向こう側付近に赤外線受信機を置いて赤外線を受信したら明るいランプを5秒なり10秒点灯するようにします。一応、反時計方向にターンするようにしますので、ボートの右側に取り付けた装置から右方向に赤外線の信号を出します。
今回製作した赤外線送信機です。機首は右です。
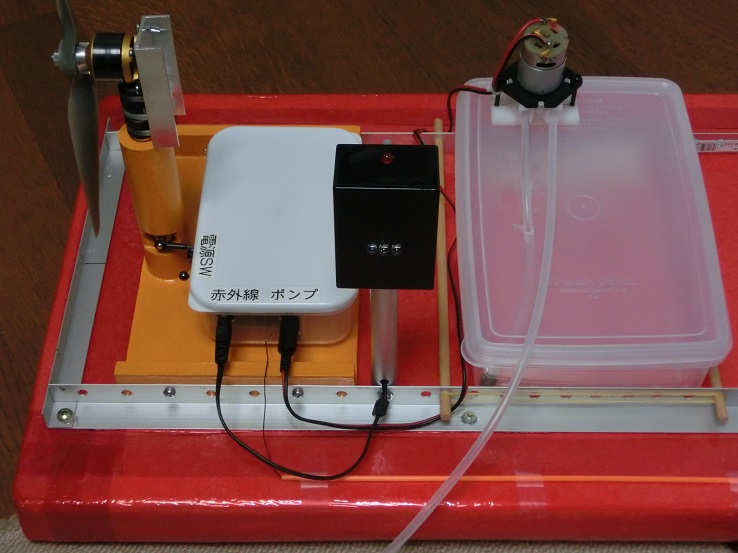 写真23 推進ユニットを25ミリほど前に取り付けた
写真23 推進ユニットを25ミリほど前に取り付けた
アルミパイプの先端にプラの箱を付けました。箱の上に赤のパイロットLEDを付けてます。電源はリポからの11.1Vで5Vに落としてます。電源オン後、15分で赤LEDを点滅にして赤外線送信を停止します。
 写真24 赤外線LEDは地上高20cmくらい。 受信機の高さも合わせる予定。
写真24 赤外線LEDは地上高20cmくらい。 受信機の高さも合わせる予定。
赤外線LEDは、高輝度のLED3個を直列にして制限抵抗は付けてません。計算上少し過電流のはずですが、常時点灯ではありませんので大丈夫のようです。制御はmini arduino proによる赤外線リモコン送信のデモプログラムをそのまま使っています。設定時間の間、ダミーデータを繰り返し送信するだけです。Arduino-IRremoteを参照ください。
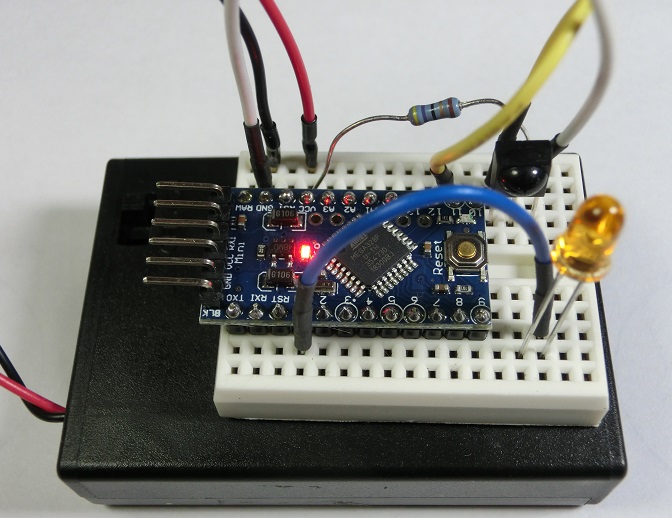 写真25
写真25
受信側は製作中です。送信側と同じくリモコン信号を解析するプログラムをそのまま使っています。どのようなリモコンであっても受信したらランプを点灯します。電源と標識に使えるランプが決まっていません。昼間の明るい時間帯に、100mほど向こうにてランプが点灯しているのを確認できる明るさというのが必要です。ブレッドボードで、屋内にて送受信の到達距離は確認しました。リモコン信号ですから、外来ノイズにもそれなりに強いはずです。たぶん屋外でも大丈夫です。
写真23で、推進ユニットを25ミリほど前に取り付けました。これで薬液タンクに500ml、750ml、1000ml、あるいは1300mlほど入れた状態で走行性能(直進の加減速と緩やかなターン)を確認しようと思います。そのうちに。
それと、過放電を防止する意味でバッテリーアラームを購入しました。制御ボックス内になんとか収められます。かなり大きな音が出ますけど、蓋をしますので現場で聞こえるかどうか不明です。
 写真26
写真26
追記12/11 赤外線受信による標識LEDランプができたのでメモします。
材料は100ショップで売られている角形のガーデンソーラーライトと角形の12V、LEDライトです。適当な電源がありませんので、3セル11.1V1000mAhのリポ電池を購入しました。
杭の部分だけを利用し、杭の上部にLEDライトを取り付けます。このLEDライト驚くほど安いのに筐体はアルミのダイキャストです。背面に取り付け突起がありましたので、2.5ミリの下穴をあけて3ミリのタップをたてました。
 写真27
写真27
適当なアクリルケースを取り付けて写真25で作った赤外線リモコン受信機を取り付けました。 上部に電源スイッチを付けました。
 写真28
写真28
ケースの右側にある黒いのが赤外線受光素子です。パイロットランプとして赤のLEDを点滅させています。12VのLEDライトをFETで駆動しています。実測、1Aほど流れます。受光時に4秒間点灯するように設定しました。点灯時間が短いのでヒートシンクは不要でしょうけれど、ケースに余裕がありましたのでアルミチャンネルの切れ端にFETを取り付けました。
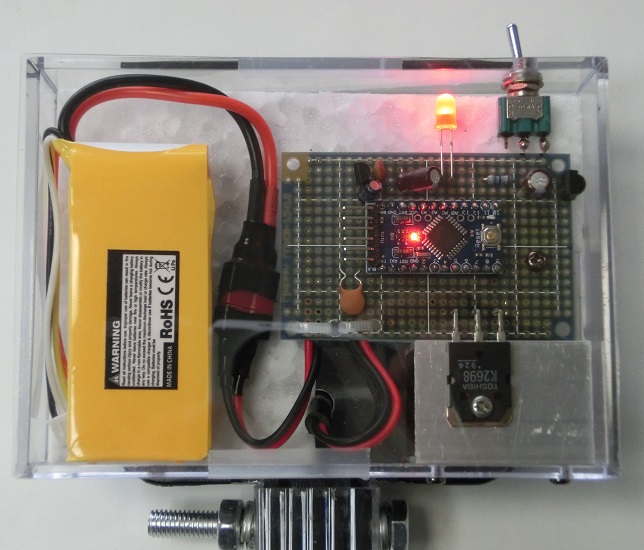 写真29
写真29
背面で赤いパイロットランプが点滅しています。この状態で写真を撮りました。
 写真30
写真30
相当な明るさです。至近距離では直視できません。これなら100mほど向こうでも確認できるでしょう。
 写真31
写真31
リモコン信号を受光した際には12VのLEDライトと赤いパイロットランプは点灯にしています。 点滅は電源スイッチの切り忘れのためです。実際のパイロットランプの点滅はもっと速いです。
GIF
これで、一応の完成です。実用になるかどうかはわかりませんけれども、来春には現場で試したいと思います。
追記12/25 休日にため池で試走しました。まだ調整が必要でした。前回より推進ユニット(オレンジに塗装した部分)を1コマ分前に取り付けています。薬液タンクは同じ位置です。
 写真32
写真32
除草剤のダミーとして水1リットルを入れました。
 写真33
写真33
試走できる池の部分は狭いのですが、水際まで階段で行けて便利です。
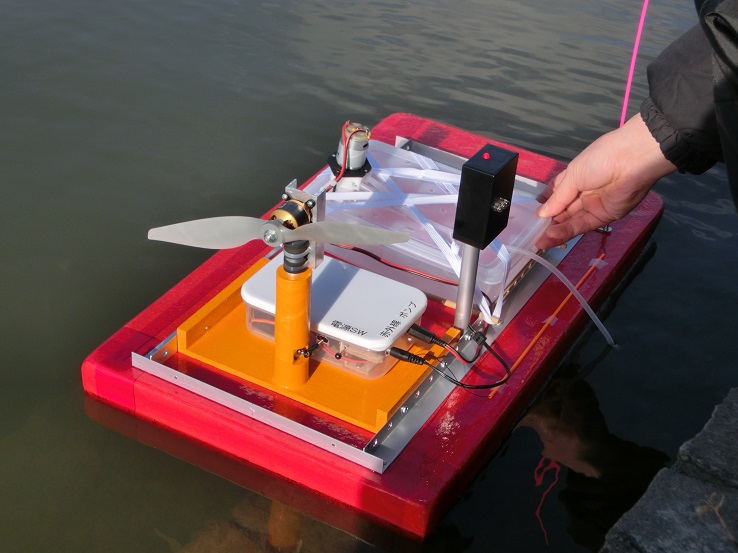 写真34
写真34

写真35
普通に走行できますけど、赤外線装置を取り付けた右側に少し傾いています。
 写真36
写真36
危惧していたように加速時に船首が沈み込みました。このとき全速の加速はしていません。
 写真37
写真37
 写真38
写真38
ダミーとして積んだ水を吐き出す10分余りの間、加速・減速とターンを繰り返しました。以下、わかったことです。
- 赤外線送信機の重さで船体が傾くとともに、船体の重心が高くなる。
- 水の重みで最初は加速時の沈み込みが酷い。
- 中スローでのいっぱい舵は極端なターンをする。
- フルスロットル付近で、時折モーターコントローラーがロックする。
- 風の影響はかなりある。
今回の試走でわかった調整すべき点です。
- 赤外線送信機を船体中心線に低く取り付ける。
- 推進ユニットを1コマ後ろに取り付ける。
- ロックの件の調査。
これで水1リットル積んだ状態で酷く沈み込みしなくて、排出後に船首が上がりすぎなければだいたいOKかと思います。ロックの件はスロットルをスローに戻すと直ぐにリセットされますが原因不明です。
追記2019/5/7 先日、代掻き後の田んぼにて、ダミーに水(500ml)を積んで試験走行しました。 ボートは初めてでして、直進性がないので苦心しました。 5/3に田植えして、5/5に散布しました。 その時の感想を備忘として記します。写真はありません。
- 船体が軽いので無風でないと散布は厳しい。
- 直進性が悪い。
- 舵の利き始めが遅いので、当て舵を打っても船体の姿勢が変わらない。当て舵が正しいのか惑う。その後急激に向きを変える。
- 結果、蛇行してしまう。
- 他の動画を観るとジャイロを積んでいるのがある。理由がわかった。
- 赤外線リモコンによる信号合図ランプは機能するが、船体の進入角によっては反応しない。90m近くの距離では船体の姿勢を正確に制御できない。目視も困難。つまり、信号合図ランプは使えない。そこで、田んぼの半分くらいに区切って散布することにする。
- 田んぼの水深について。船体が軽いので底の泥にひかかると急に進行方向を変える。喫水は1cm程度なので、田植え後に底がつかえない程度の水張りが必要。
- 薬液の量は500mlで行なう。散布時間を気にすることはないようだ。
5/5にフロアブル剤を散布しました。早朝で、ほぼ無風でした。軽量の船体ながら田植え直後の苗にひかかるかと心配しましたが大丈夫でした。ポンプも正常に動きました。
フロアブル剤は思ったより粘度が高くて薬液タンクの底に5%近く残ってしまいます。残った薬液は水を加えて散布しました。 うまく行かないときは、水口より流し込むか、歩いてまくつもりでした。ほぼ予定の通りうまくまけましたのでよかった。 なお、赤外線リモコンによる信号合図ランプは使わないので、送信機を取り外しています。どうも誤動作は赤外線リモコンからのノイズによるものだったようです。実際の散布時には誤動作はありませんでした。
歩いてまくより格段に楽です。ラジコンボートで遊んでいるようで楽しかった。
追記2019/5/24 本年、田植えは5/3で、上記のフロアブル剤散布が5/6でした。このところ水持ちの悪い田に雑草が見られるようです。除草剤の効きも悪く、取水に伴い雑草の種が入ってくるようです。例年、シズイやオモダカといった雑草がはえますので、ハイカット剤を散布しています。
そこで、RCプロペラボートでチェーン除草のまねごとをしました。写真はないです。結果はダメでした。
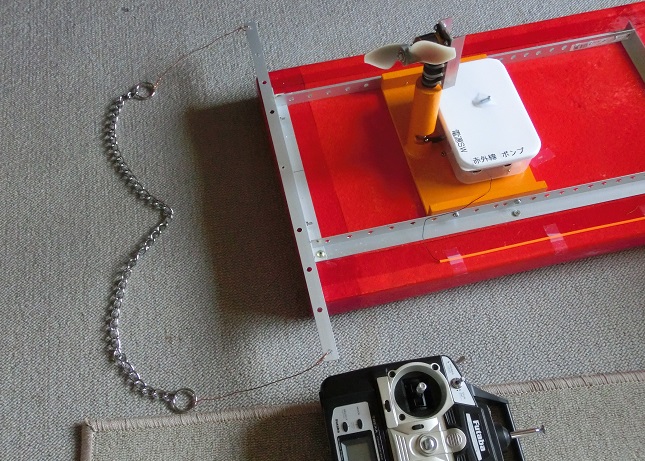 写真39
写真39
DIY店で60cmのチェーンを購入し、後部につけました。写真のように3点支持にしました。受信・制御・推進部のユニットは前に付けました。結果は次です。
- ユニットが前だと、舵がきかない。散布時と同じ位置にセットし直した。
- 速度が遅いと舵がきかない。
- スピードを出すとチェーンが浮いてしまう。
- 稲に引っかかるだけ。
- 少々、泥面をかすりますので、水は濁りますけど効果は期待できない。
予想の通りでした。今年もハイカット剤は注文したので、これで対処します。
先日、某所で、業務用のRCプロペラボートにて除草作業をしているのを見ました。遠目でしたが船体は、ヤンマーの「防除用ラジコンボ-ト YDB-35F」のようです。全国的に荒れた天候でしたから、強風の中散布していました。仕様を確認すると、重量14.4kgの4サイクルガソリンで、7000rpmとあります。これなら強風でも大丈夫でしょうし、直進性もあります。ただ喫水に注意です。それと、エンジンの出力最大回転数が7000rpmは、適合するプロペラがあるかどうかです。(入手可能かどうか。)
小規模水田用に自作するならば、刈り払い機エンジンで10kgまでの船体で、適合するプロペラを見つけることが先決だと考えます。船体はボディーボードが適当のようです。動画サイトで見受ける自作ボートについて、エンジン出力(回転域)とプロペラの特性があっていないと思われるのがあります。これは残念です。
20205月8日追記 5月3日に田植え、本日昨年と同様、フロアブル剤を散布しました。 無風、少し推進が浅く、時折、浅瀬にのります。このような電動ボートでは無風かつ水深が十分でないとだめです。それと、年の1回の使用では、リポバッテリーの調子が上がらないままです。事前にバッテリーとポンプの点検が必須です。
2021/05/12追記 5月4日に田植え、5月8日に液剤を散布しました。ボートでの散布は今年で3年です。バッテリーは事前に何度か充放電して確かめました。ポンプのシリコンチューブは少し細めに交換したため、吐き出し量が減少し、散布に時間がかかることから、丁寧にまけました。ポンプについて、長期間放置するとチューブが潰れてしまいますので、ポンプをばらして保管します。
2024/06/02追記 毎年、このボートでフロアブル剤を散布してきました。今年は、5/6に散布しました。これで、6年使いました。
まだ、使えますが、船体・モーターが小さいので、水深が十分あって、かつ完全に無風でないと使えません。次のボートを作ろうと計画しています。
2年前の散布の様子です。


学校ファームで田んぼを作ります。そこで除草をエアーボートでチェーン除草できないかと考えています。電動のエアーボートではチェーン除草は無理と書いてありますが、https://www.youtube.com/watch?v=0nLHvLuVmVYの動画ではしっかりと動いているようです。毎分8500回転のブラシレスモーターということです。電動でもできるのではないでしょうか。いかがでしょうか。
ありがとうございます。お返事遅れて申し訳ありません。
私の作ったボートは、代掻き後の水面に土が出ていなくて、かつ無風でなければ使えません。このボートは、構造上スロットルの強弱によって舵が振れて、直進がむつかしいです。(対策としてラダーにジャイロを入れました。)その上でのチェーン除草は無理です。
チェーン除草を計画されるならば動画のように、プロペラ方式で、けん引する型式にするのは、よいアイディアだと思います。ただし、小回りが利かないようです。それと推進装置がボートの重心より前にありますので、チェーン除草以外に使えないと思います。チェーンなしで加速すると、前のめりに船首が沈み込むはずです。
技術ありますね
私事ですが最近arduinoでpidによる自作サーボがなんとか出来ました
使っているオシロスコープ私のと同じです
PIDはやったことがありません。電力制御や駆動系はノイズに悩まされますね。わかります。記事の電動ボートは非力で軽すぎて、無風の早朝でなければ散布作業はできませんけれど、一応、使えます。気を抜くと手作業で草取りするはめになりますので、早めに散布です。 年に一度しか使わないので、リポのメンテが面倒ですし、保管も気をつかいます。万一を考えて金属の空き缶に入れてます。
旭川農業高校でプロペラボートの作成(動画 あり)を見ました。刈り払い機のエンジンを使用していました。参考にしてはいかがでしょうか。
旭川農業高校 畑作部 製作マニュアル アドレス
https://drive.google.com/file/d/0B3midDiYVo6bUTdyTDc4U1lPNHM/view
ありがとうございます。拝読しました。ガソリンエンジンでの製作の要点は2つです。1.エンジンとプロペラとの結合部をどうするか。芯だしが面倒、クラッチの有無など。 2.エンジンのトルクにあったプロペラはあるのか。1.については記述があり参考になります。リンク先は2.について気にしている様子はありません。たぶん理解していないようです。後は私が製作するに考えたことと同じです。他の例では、方向を電動プロペラで制御しているのがあり、これは優れていると思いました。